電動シリンダ
全体的にどのように作成するのか大まかに書いていきます。
作成日:2016年05月16日
更新日:2021年10月05日
電動シリンダ
電動シリンダとは、エアシリンダのように圧縮エアーを必要とせず、電源と信号があれば動作します。しかも電動シリンダはストロークの範囲内であれば自由なポイントで停止させることもできます。停止ポイントを複数設定することも可能です。
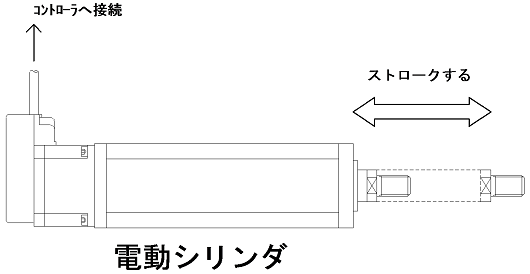
上の図のように先端のロット部分がストロークします。ただしほとんどの場合がシリンダ本体とは別にコントローラが必要です。
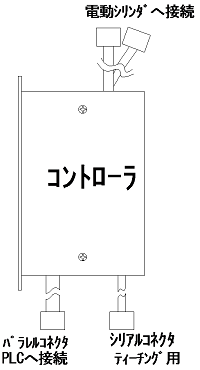
コントローラとシリンダを接続します。パラレルコネクタの部分から出ている配線をPLCへ接続します。配線は各メーカーで違いますので説明書を参考に接続してください。ほとんどの場合、現在位置の出力とこれから移動させたい目標位置の入力と、移動指令、停止指令、非常停止入力などがついています。
まず配線を行います。現在位置や目標位置はバイナリで出力されます。4ビットの組み合わせで、現在のシリンダの位置ポイントを出力してきますのでPLC側の入力ユニットの入力端子に接続してください。シリンダを動作させるためには目標位置を出力しながら動作指令をコントローラに出力します。
このあたりの動作は電動シリンダのマニュアルをしっかりよんで理解してください。それではプログラムを作ってみます。
プログラムの書き方なのですが、私がみた限りでは色々な専用機メーカーで色々な書き方がありました。無理やりエアシリンダのように動作させている方法。「SET」「RST」命令で動作させている方法。色々な方法があり、どれが正しいか間違えかなどはありません。そのため私が紹介する方法も正しいかどうかは分かりません。わかりやすくしているつもりなので、参考になるようでしたら参考にしてください。
現在値確認
現在位置を確認するプログラムです。位置の値は「D0」へ転送しています。
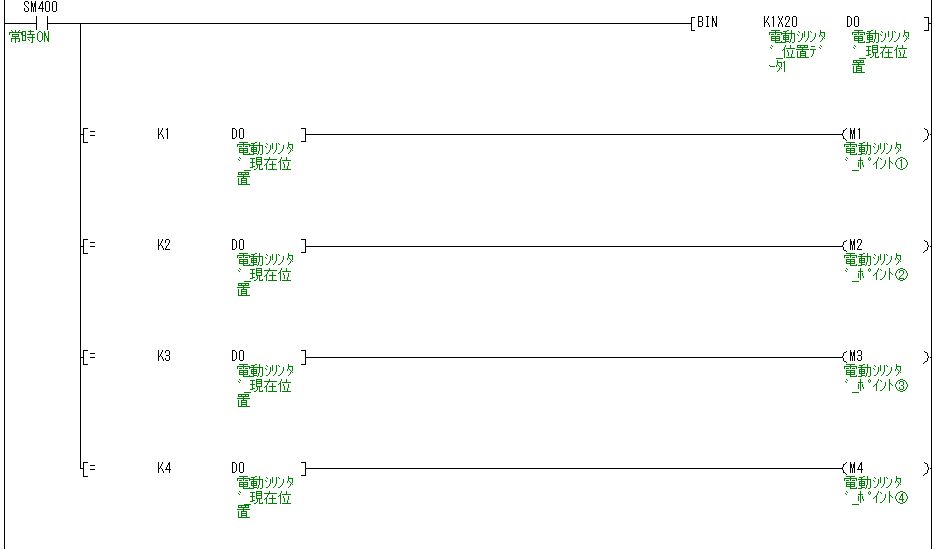
ここは常時ONで常にスキャンさせています。必要であれば原点復帰完了の接点を追加してください。
動作回路
次は出力部分です。この部分は一度作成すると特に変更や追加をする必要はないと思います。目標位置は「D1」を使います。
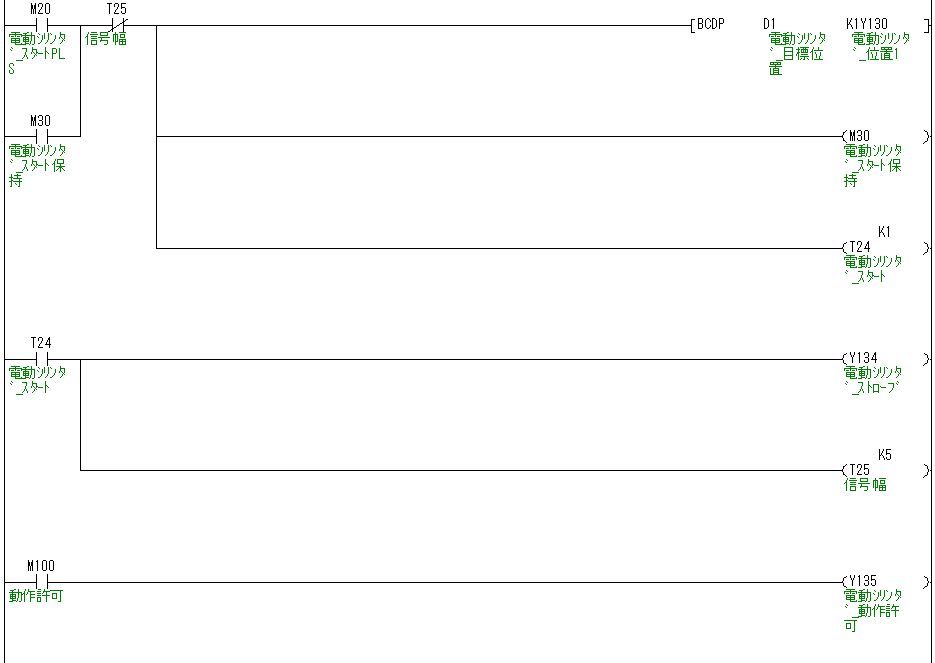
まず「M20」というスタートパルスが入ると、「D1」の値を「Y130」~「Y133」へBCD命令で出力します。そして「M30」を使い自己保持します。
「M30」がONして0.1秒後に「T24」が入ります。「T24」が入ると「Y134」のストローブ指令が入ります。この指令は0.5秒間入ると消えます。0.5秒後には「M30」の自己保持も解除するようになっています。
つまり「M20」が入ると「D1」の目標位置を「Y130」~に出力し、電動シリンダにストローブ信号を出力し、電動シリンダを動作させています。
では使い方です。次のように使います。
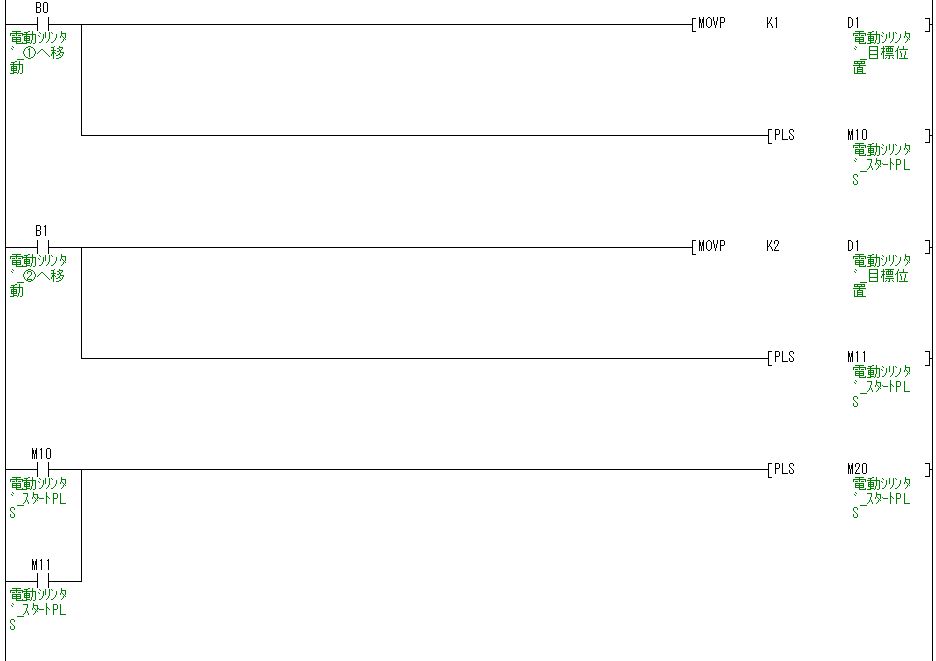
まず動作指令の「B0」が入ると「D1」に”1”を転送し「M10」のPLSを出しています。「M10」は「M20」のコイルを動作させています。ここが先ほどの「M20」となります。「B1」も同じです。”2”を「D1」に書き込んで「M20」を動作させています。
つまり目標の移動ポイントを転送して、「M20」を動作させているだけです。実際はこの部分をメイン動作の中に書き込みます。シンプルに見えませんか?
このプログラムのポイントは、この部分では移動完了の信号を使用していないということです。例えば「M20」の自己保持を解除するのに、移動完了信号で解除する人もいると思います。私はしません。あくまでこの部分のプログラムは他の部分と独立していて、自分自身で自己保持は解除する仕組みにしています。移動完了しない場合はメイン動作の部分で異常処理を行えばいいからです。この書き方なら、手動で電動シリンダ動作中でも、別のポイントに切り替えることも可能です。動作に制限やインターロックを掛けるときは、もう少し上(動作側)の部分で掛けるようにしています。
電動シリンダは”0”ポイント~位置が設定できます。しかしポイントの”0”番目はできるだけ使用しないようにします。それはエラーが出たときや、自分の位置が分からないときは”0”を返してくるからです。今回のプログラムでは「BCD」や「BIN」命令を使用しましたが、”10”ポイント以上使用する場合は「MOV」命令に変更してください。又、今回のプログラムは「BCDP」というパルス命令を使用していますが、動作しない場合はパルスを外してください。 最後に非常停止や動作許可信号などが出力されていないと動作しません。配線をして、出力させてください。
図解入門 よくわかる最新 シーケンス制御と回路図の基本はKindle版(電子書籍)です。単行本ご希望の方は、フォーマットで単行本を選択してください。または、トップページよりご購入ください。
