自動と手動を分ける
自動動作中に手動操作ができてはいけません。手動操作中に自動動作してはいけません。当たり前のことですが、このようなことができないようにラダー図を作る必要があります。
作成日:2019年05月10日
更新日:2022年12月29日
インターロック
プリセットカウントの説明まで完了しましたが、現状のプログラムは手動操作から順番に自動動作など、個別に追加説明してきました。
ここまでの内容をダウンロードできます。ダウンロードはダウンロード同意書に同意したものとします。
kouzaV100_53_9.zipダウンロード

しかしこの回路には致命的な間違いがあります。この回路は個別に内容を説明したため、各動作の連携が取れていません。どういうことかというと、自動起動中に手動操作ができてしまいます。自動起動中に手動で操作できるのは大変危険です。このシミュレータではコンベアが動作するだけですが、実際の設備ではシリンダやロボットなどあるので設備の破損につながります。自動起動中は手動が動かないこと。手動で動作中は自動は起動しないこと。このように片方が動作しているときに、もう片方を動作させない行為をインターロックと呼びます。このインターロックは他にもモーターの正転と逆転が同時にONしないようにする等、幅広く使われる用語なのでおぼえておいてください。
最初に手動側から作業を行います。次のように「M5」のコイルを手動回路の先頭に挿入(追加)します。
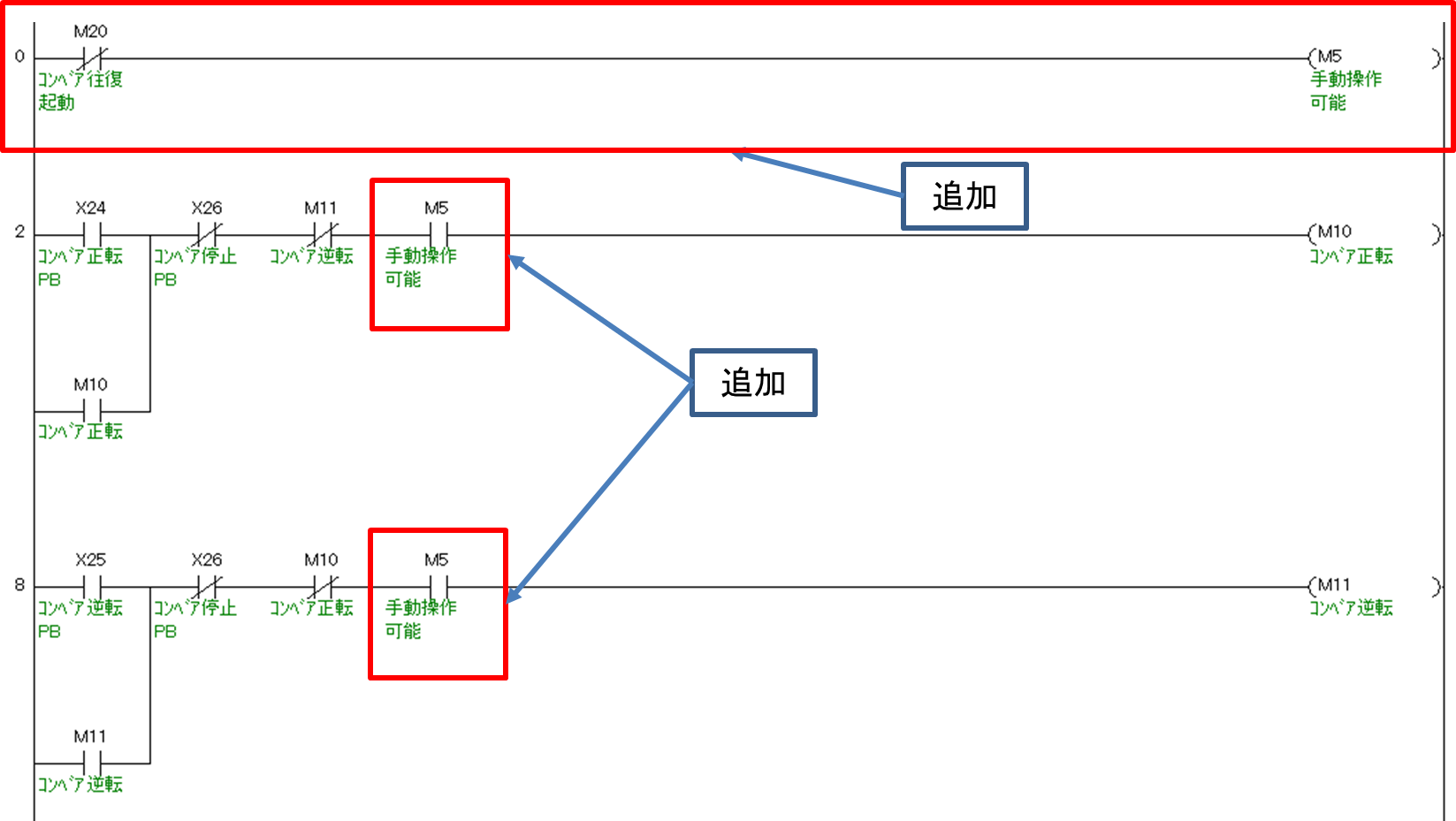
そして「M5」の接点を手動回路条件に設定します。今回は自己保持の条件として「M5」の接点を追加しました。これで「M5」がONしていないと手動回路は動きません。この「M5」がONする条件は自動起動がONしていないこと。つまり「M20」がOFFであることになります。たとえ手動動作中で「M10」がONしていても、「M20」がONすれば手動動作は即停止します。
専用コイルを使う理由
「なぜわざわざ「M5」を使うの?」と思うかもしれません。「M5」の接点を追加した位置に直接「M20」のb接点を追加しても同じ動作になります。これはプログラムを作っていくとどうしても「こうしたほうがいいかも」という要望が出てきます。今回の例で説明すると手動の操作インターロックに、自動起動とは別に「異常発生中も操作できないようしたい。」、「非常停止中も操作できないようにしたい。」と条件が追加する場合、この「M5」のリレーに対して条件を追加すればいいので作業も楽になります。対して「M5」の接点位置に「M20」のb接点を直接追加している場合は条件が増えるたびにすべての動作に対して追加する必要があります。今回のサンプル回路は手動動作が2個なので簡単ですが、手動動作の回路が増えると大変になります。
条件が共通であれば「M5」のように内部リレーを1個使ってまとめたほうが見た目もシンプルになりますし、後の変更も楽になります。
同じ用に自動起動側にもインターロックを追加します。
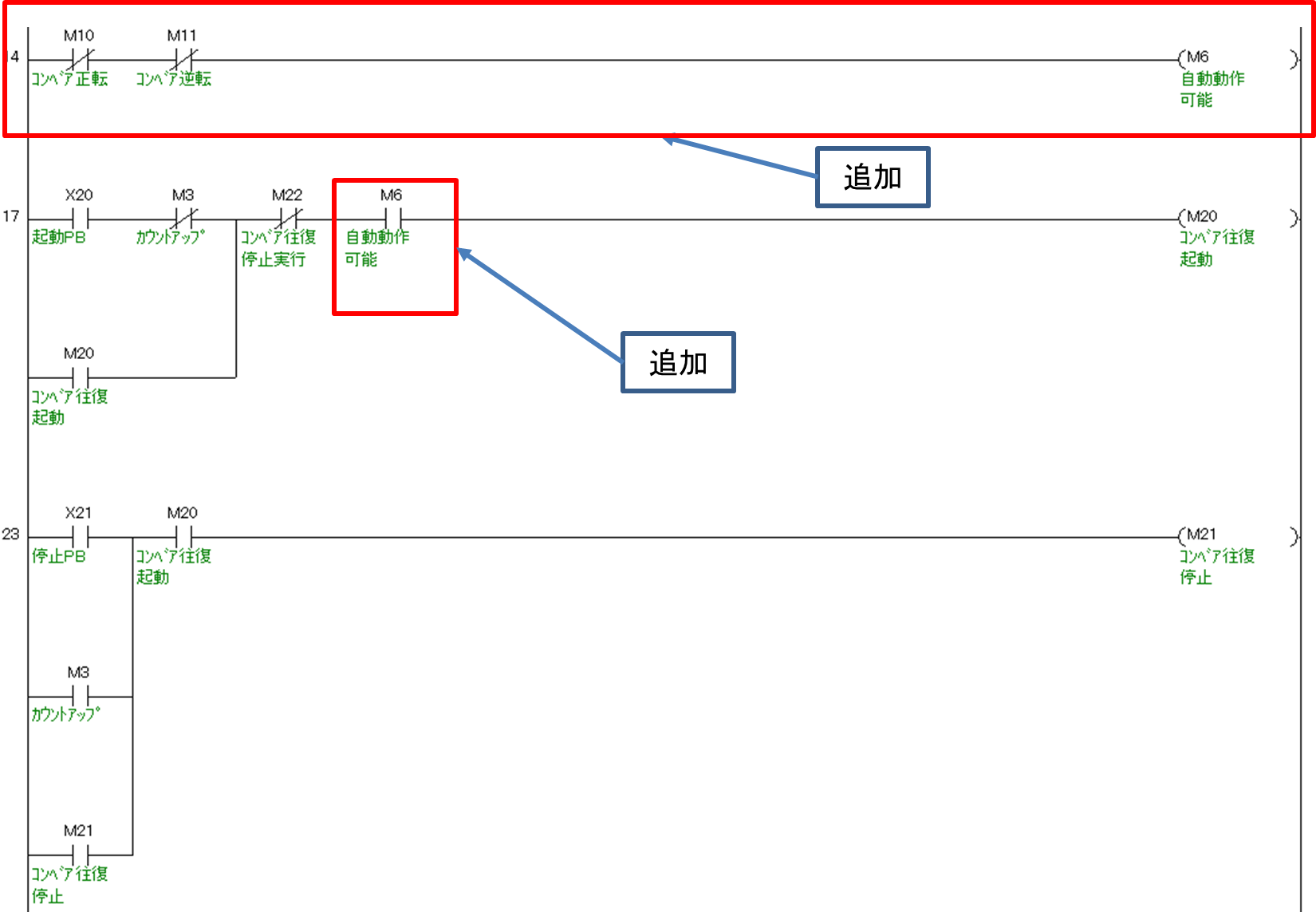
自動起動側は「M6」を使いました。先ほど手動側のインターロックの説明で「たとえ手動動作中で「M10」がONしていても、「M20」がONすれば手動動作は即停止します。」と書きましたが、実際はお互いにインターロックがかかっているためこのような操作はできません。
これで自動起動中には手動操作はできないし、手動動作中も起動ができないようになりました。
この無料講座がとてもいいと感じた方は「実践!ラダー学習キット」という有料講座も準備していますので、是非参考にしてください。無料講座と同じくシミュレータを使いますが、内容がとても充実しています。基本的なことはもちろん、簡単な設備の動作まで解説しているので興味のある方は是非検討してみてください。
ここまでの内容をダウンロードできます。ダウンロードはダウンロード同意書に同意したものとします。
kouzaV100_53_10.zipダウンロード
図解入門 よくわかる最新 シーケンス制御と回路図の基本はKindle版(電子書籍)です。単行本ご希望の方は、フォーマットで単行本を選択してください。または、トップページよりご購入ください。