コンベア往復動作
コンベアを往復させる回路を使って、ラダー図の基本的な書き方を解説していきます。
作成日:2019年05月10日
更新日:2022年12月27日
動作内容
コンベア動作の講座でコンベアを手動で回転できるようにしました。そのまま回路を使って次はコンベアを往復動作させてみます。 回路は「M11」と「Y0」のコイルの間に挿入してみましょう。行挿入は「SHIFT」+「INSERT」でできます。
- 起動「X20」をON→コンベア往復動作開始
- 停止「X21」をON→コンベア往復動作停止。ただしセンサ1の位置
- コンベア往復はセンサ1とセンサ2の間
まずは起動と押すとコンベア往復動作を開始します。この場合「コンベア往復動作」という一連の動作をひとまとめにして、この動作を行うリレーで自己保持を作ります。このリレーがONしている限り往復動作を繰り返すというリレーです。今回は「M20」をつかいます。この「M20」がONしている間はコンベア往復動作を繰り返します。そして停止はセンサ1の位置で停止ということなので、往復して元の位置に戻ってきて停止ということです。このような停止方法をサイクル停止とよびます。
コンベア上を箱が往復しているとき、どの位置で停止ボタンを押しても必ずセンサ1の位置で停止します。最初に全体の回路を見てみましょう。「M11」と「Y0」の間に挿入しましたが、「M11」より上は今回使わないので表示していません。
動作回路
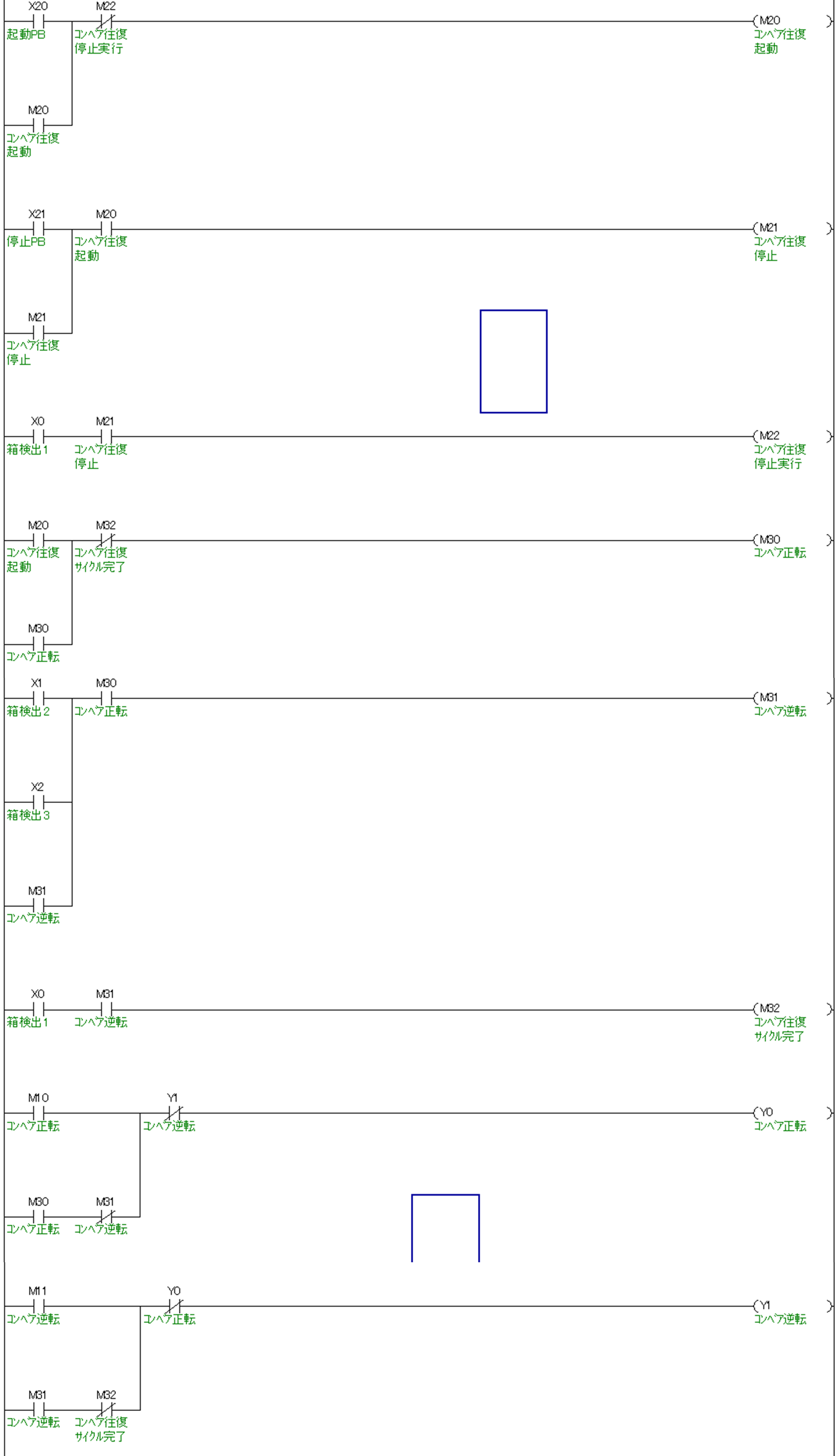
簡単に描くとこんな感じになります。では順番に説明していきます。最初の「M20」の部分からみていきましょう。
回路解説
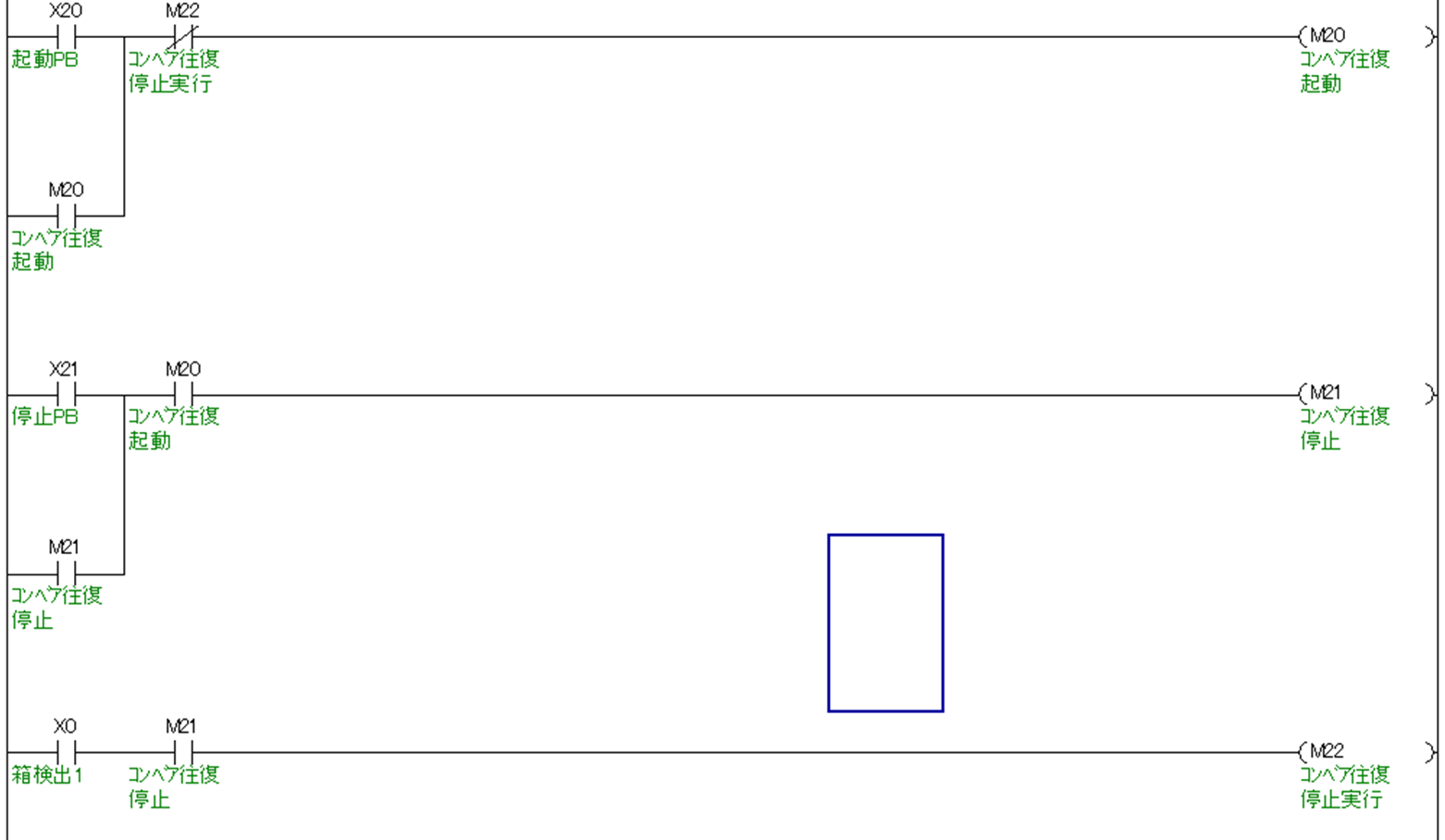
「コンベア往復動作」という一連の動作をひとまとめにして、この動作を行うリレーで自己保持を作りますという少し難しい言い方をしましたが、この「M20」がONしている限りコンベア往復動作を行います。これは通常の設備でも使う方法で、「自動起動」や「連続起動」とよばれる方法です。
次は停止です。「X21」が停止ボタンです。「X21」で「M20」の自己保持を解除しても停止しますが、今回はサイクル停止なので即停止させず、条件が整ったら停止させます。そのためまず停止ボタンが押されたら「M21」で自己保持をかけ、停止待ち状態にします。そして次の「M22」は停止状態でセンサ1が入ったときONします。この「X22」を使って「M20」の自己保持を解除すればサイクル停止となります。
この「M21」の自己保持条件に「M20」が入っています。これはサイクル停止というのは運転中に発生するものであり、何らかの原因で停止状態になっても自動的にOFFするようにしています。もちろんサイクル停止で停止した場合もOFFします。このように必要以外のときは動作しないようにしておくのがバグの対策にもなります。
次は往復動作の部分を見ていきます。
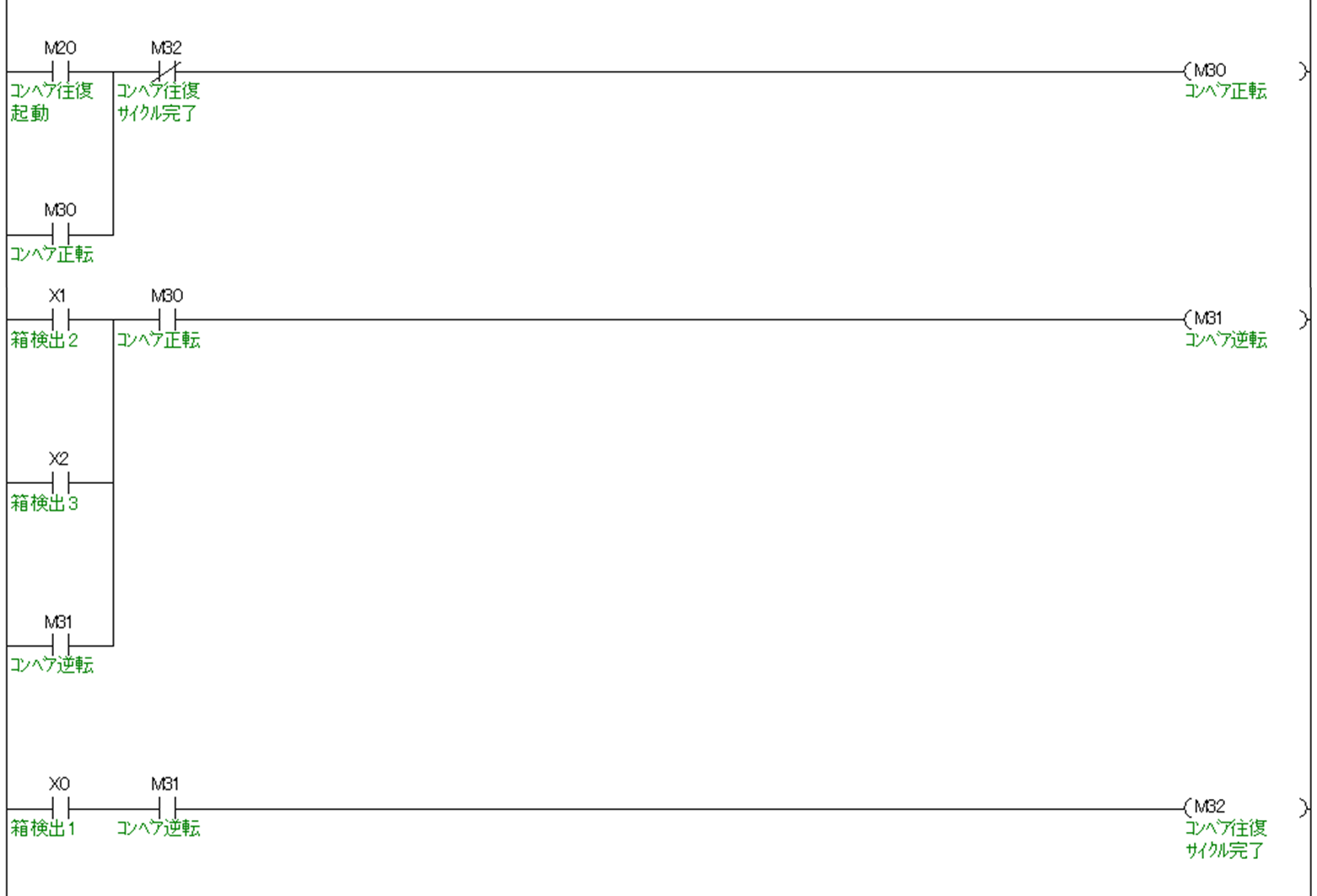
先ほどの「M20」を使って「M30」がONします。この「M30」でコンベアが正転します。次に「M30」がONした状態でセンサ2がONすると「M31」がONします。この「M31」でコンベアが逆転します。ここで「X2」のセンサ3も「M31」の条件に入っています。これは箱がセンサ2よりも右側で起動をかけると動作しなくなる対策です。センサ3に触れてもコンベアは逆転するようになっています。
そして最後にコンベア逆転中にセンサ1がONすると「M32」がONします。この「M32」はサイクル完了となり、動作回路の先頭の「M30」の自己保持を解除します。それにより動作回路自体が一旦リセットされ、「M20」がONしている限りは再度動作が実行されます。次にコンベアに出力する方法をみていきます。
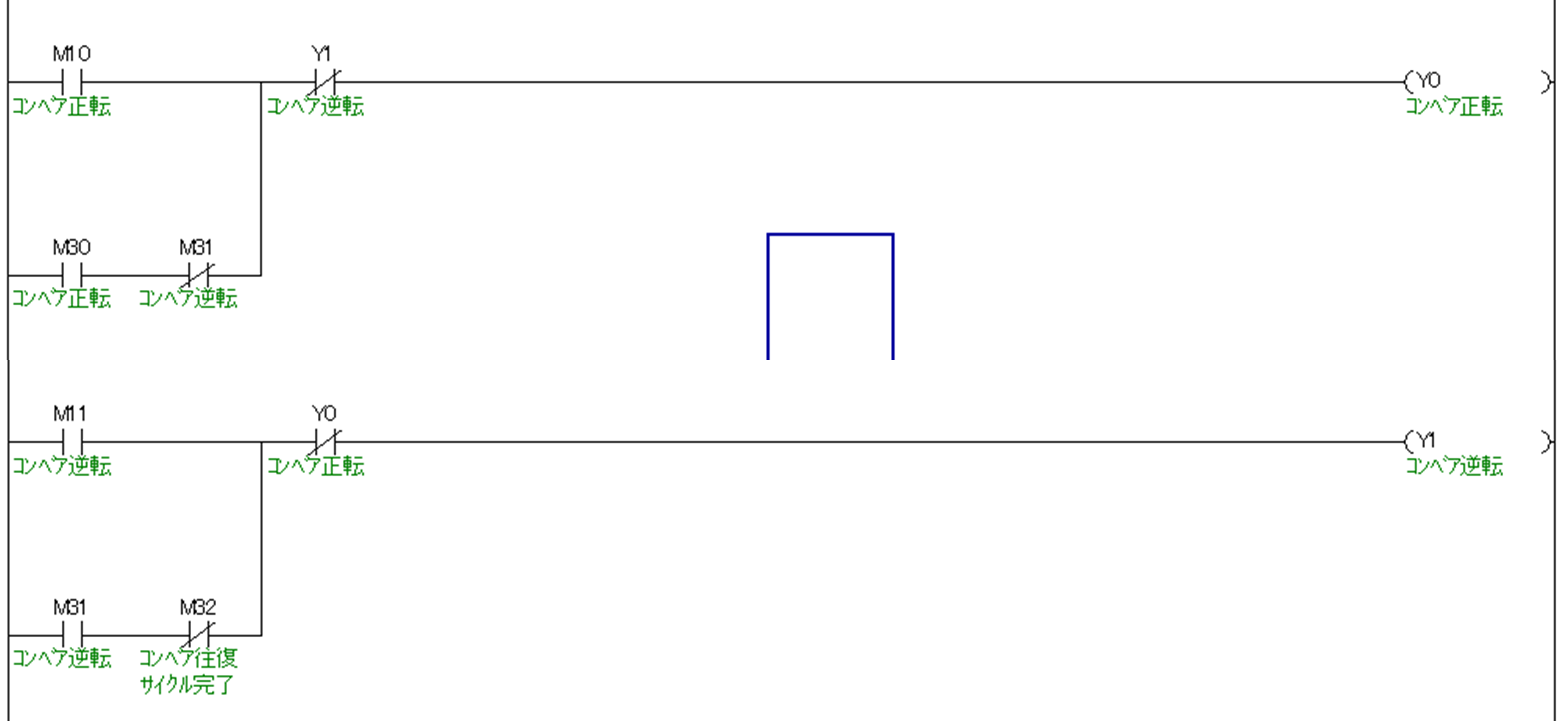
手動回路で使った「M10」と「M11」の接点は残しています。まずは「M30」がコンベア正転でした。「M30」で「Y0」をONします。これで正転します。次は「M31」で逆転です。逆転時は正転の「Y0」をOFFしないといけません。そのため「M30」の横に「M31」のb接点を挿入します。これで逆転時は「Y0」はOFFします。
あとは「M31」でコンベア逆転の「Y1」をONします。そして逆転停止のb接点を「M31」の横に挿入すれば完成です。今回はサイクル完了の接点を入れていますが、動作回路の最後の部分なので特になくても停止します。
これが一連の流れです。気がついたかたもいるかもしれませんが、実はこの回路「M21」で停止待ちにして、センサ1がONしたタイミングで起動「M20」の自己保持を解除していますが、何も考えずに「M20」の自己保持を解除してもサイクル停止します。動作回路の部分で「M20」がONしたとき「M30」で自己保持しています。つまり「M30」がONしていれば「M20」をOFFしても「M30」→「M31」→「M32」と順番にONしていき最終的にサイクル停止になります。
今回は分かりやすく描いたためこのような形になりましたが、実際は動作回路が複数ありすべての動作回路がサイクル完了したとき起動の自己保持を解除します。つまり停止ボタンで停止待ちになったとき、すべてのユニットの動作回路に対してサイクル完了後再度動作しないようにロックをしないといけません。
具体的にはこの回路で説明すると、「M30」のコンベア正転のブロックをみてください。「M20」が起動条件になっていますが、この「M20」を「M21」のb接点に変更します。そして「M32」のb接点の右側に「M20」のa接点を挿入します。こうすれば停止待ち状態ですべてのユニットはサイクル完了後停止しますので、全ユニット停止後に「M22」をONすればサイクル停止となります。興味がある方はシミュレータと使っていろいろチャレンジしてみてください。
ここまでの内容をダウンロードできます。ダウンロードはダウンロード同意書に同意したものとします。
kouzaV100_53_4.zipダウンロード

図解入門 よくわかる最新 シーケンス制御と回路図の基本はKindle版(電子書籍)です。単行本ご希望の方は、フォーマットで単行本を選択してください。または、トップページよりご購入ください。